The intention of this assignment was to make preparations for two different projects. The first project is to map the UWEC campus mall using a camera attached to a balloon, much like the original methods used for remote sensing. The idea is to attach a camera rig to a balloon filled with helium and have it tethered to a person on the ground, who will be able to guide it around the campus mall area. The second project is a high altitude balloon launch (HABL). The HABL project consists of also attaching a camera rig to a helium balloon, but this will not be tethered to a person on the ground. The HABL will rise as high as it can, the balloon expanding as the atmospheric pressure decreases until it eventually pops, at which point the attached parachute will allow the camera rig to fall safely to the ground. Our assignment this week was to come up with the designs and determining the payload for each project.
Methods
Given the number of people in the class, it took a few minutes for people to decide what they wanted to work on and who else wanted to as well. I started off by verifying that the cameras we wanted to use had a continuous shot mode, as both projects could not be done without continuous shot.
Once we knew at least two of the smaller cameras had continuous shot, I moved over to assist with the construction of the balloon mapping rig. Our professor had purchased a kit online for a general guideline of a design we could use. Our professor also brought a large supply of seemingly random objects, though I believe that by the end of the day the majority of them had been used, or at least attempted to be used, in some way.
As we attempted to follow the directions (click link to see) provided by the kit, we quickly found out that we did not care for them, as they were slightly vague and the drawings were…interesting. This kit used a 2L soda bottle as the rig. We were to cut the 2L bottle in half and use string to create a cradle for the camera. After successfully taping the string to the camera to make the cradle (Figure 1) and pulling the top part through the 2L bottle, we noticed that the rig spun a lot, even just in a room. Another student thought of turning the 2L bottle horizontal in order to make it more aerodynamic and have more room for the camera. I decided to join the other student in researching the alternative design.
 |
| Figure 1: Amy holding the camera from its cradle. The pink string is wrapped around the camera with tape applied to keep it from slipping off. |
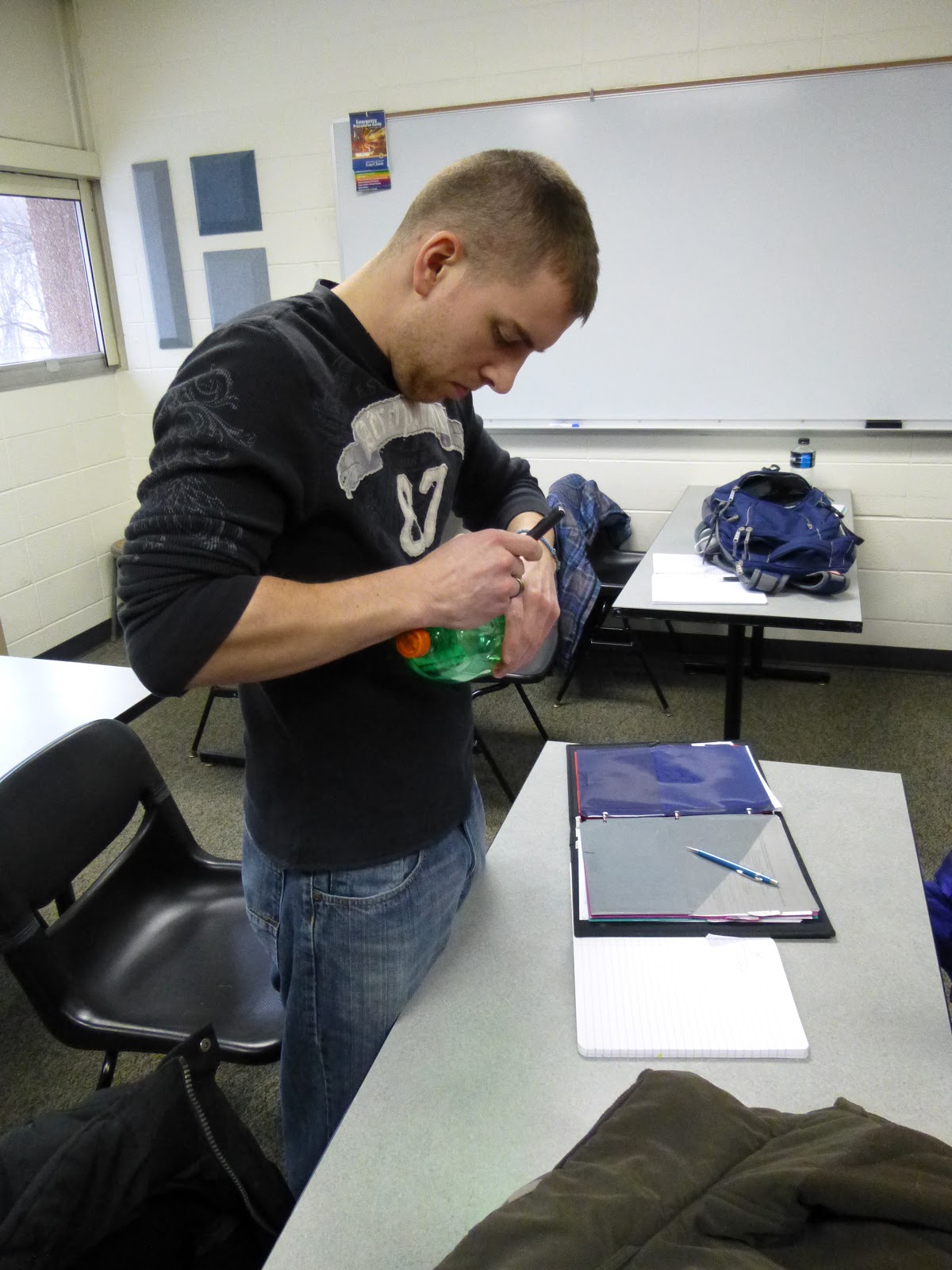 |
| Figure 2: Kent (me) using an exacto blade to cut out the designated area that the camera will be placed through. |
 |
| Figure 3: Stacy cutting the slits in the 2L bottle to slide the zip ties through. There will be four zip ties total, two to secure the camera, and two to secure the string that will be attached to the balloon. |
Once we had the camera secured, we realized that since we were not as detailed as we should be for the final project, our camera was not perfectly centered in the rig, and this could cause issues with keeping the camera level, as the center of mass was not in a good location. To counter this, we decided to make sure the string was an even length to both sides, and then tie a knot, resulting in a single loop at the top to attach the balloon (Figure 4). This should keep the camera rig balanced.
 |
| Figure 4: Stacy holding the camera rig, with camera in it. The camera is secured by two zip ties, on each side of the lens, meaning the only way the camera would potentially be able to fall off is if the lens closes (which may be possible if the battery runs out). Knot at top of string is to correct the center of mass and provide single attachment point to balloon. |
 |
| Figure 5: Stacy using zip ties to attach the vertical stabilizer to the 2L soda bottle. |
 |
| Figure 6: The finished camera rig, with vertical stabilizer attached at aft (left side in picture) section of the bottle. We cut angles on the back so the stabilizer would not interfere with the string attaching to the balloon. |
 |
| Figure 7: We tied a knot in the rubber band, and placed the knot on the button of the camera. To put enough pressure on the knot, we had to twist the rubber band around a second time. This was not the camera we used in our rig. |
Discussion
At the beginning of class I assisted in verifying that all of the cameras being used had continuous shot. We found that all of them did, and they all worked well. The only thing that could be improved with the cameras is if we were able to find one that was smaller, in order to help reduce the amount of weight on the balloon.
The group I was working with on the first design of the balloon mapper also deviated from the design in instructions that came with the kit. They found that, with the camera they were using, a 2L bottle was not wide enough, so the only way the camera would be covered and protected by the bottle was if you forced it around, which was definitely not the desired result. The group ended up switching to a cleaning solution bottle (Figure 8). They used the same ideas as was in the instruction manual, using the cradle they already had to hold the camera up (Figure 9). They then took a scrap from a soda bottle and taped it around the handle of the cleaning solution bottle to catch the wind and help reduce spinning (Figure 10).
 |
| Figure 8: Cleaning solution bottle used to protect the camera. |
 |
| Figure 9: Cleaning solution bottle with camera being suspended by cradle. |
 |
| Figure 10: Cleaning bottle with piece of soda bottle wrapped around handle and taped together. |
 |
| Figure 11: After securing the camera in the rig, I began walking around the room. |
 |
| Figure 12: Picture of floor as I walk around the room with the camera in rig. |
 |
| Figure 13: Another picture of floor as I walk around room with the camera rig. There is still no view of the soda bottle, which is good. |
 |
| Figure 14: Final picture of me walking around room with the camera rig. No view of soda bottle. |
 |
| Figure 15: In order to test that the camera was, indeed, secure, I swung it up to face the ceiling. The camera neither fell out, nor did it even shift and show any evidence of the soda bottle. |
Conclusion
I found this assignment to be quite exciting. It was fun to work with a new group of people and experiment with new ideas. Everyone seemed to work well together, and when new ideas were offered they were listened to and examine, not shot down. Both of the balloon mapping designs were rather unique and came about in their own ways, and I look forward to seeing how they each develop and perform.
No comments:
Post a Comment