Exercise conducted on: March 25th, 2013.
Introduction
This blog post discusses the final navigation exercise and compares
it with the prior three weeks. This week the field experience was a
bit more intense, mostly due to the incoming fire. While combining
what was learned over the last few weeks in navigation, we were also
provided paintball guns to combat the other teams. The goal for this
week was to collect as many of the fifteen points as possible, in any
order. We were in the same groups as before, making six teams total.
The weather finally decided to cooperate, as it was sunny and in the
upper 30's (Fahrenheit), though there was still a substantial amount
of snow on the ground.
The Methods section of this post will discuss the events of this
week. In the Discussion section I will compare the experience of
this week with the past ones, recap what was done in the three prior
weeks, and discuss the important items learned.
Study Area
The area of interest in our field navigation exercises has remained
the same over the last three weeks. The exercises were conducted at
the Priory, a 112 acre, mostly wooded area purchased by the
University of Wisconsin – Eau Claire in 2011, and located just
outside of Eau Claire, Wisconsin. The monastery located there is now
a daycare and nature center for children.
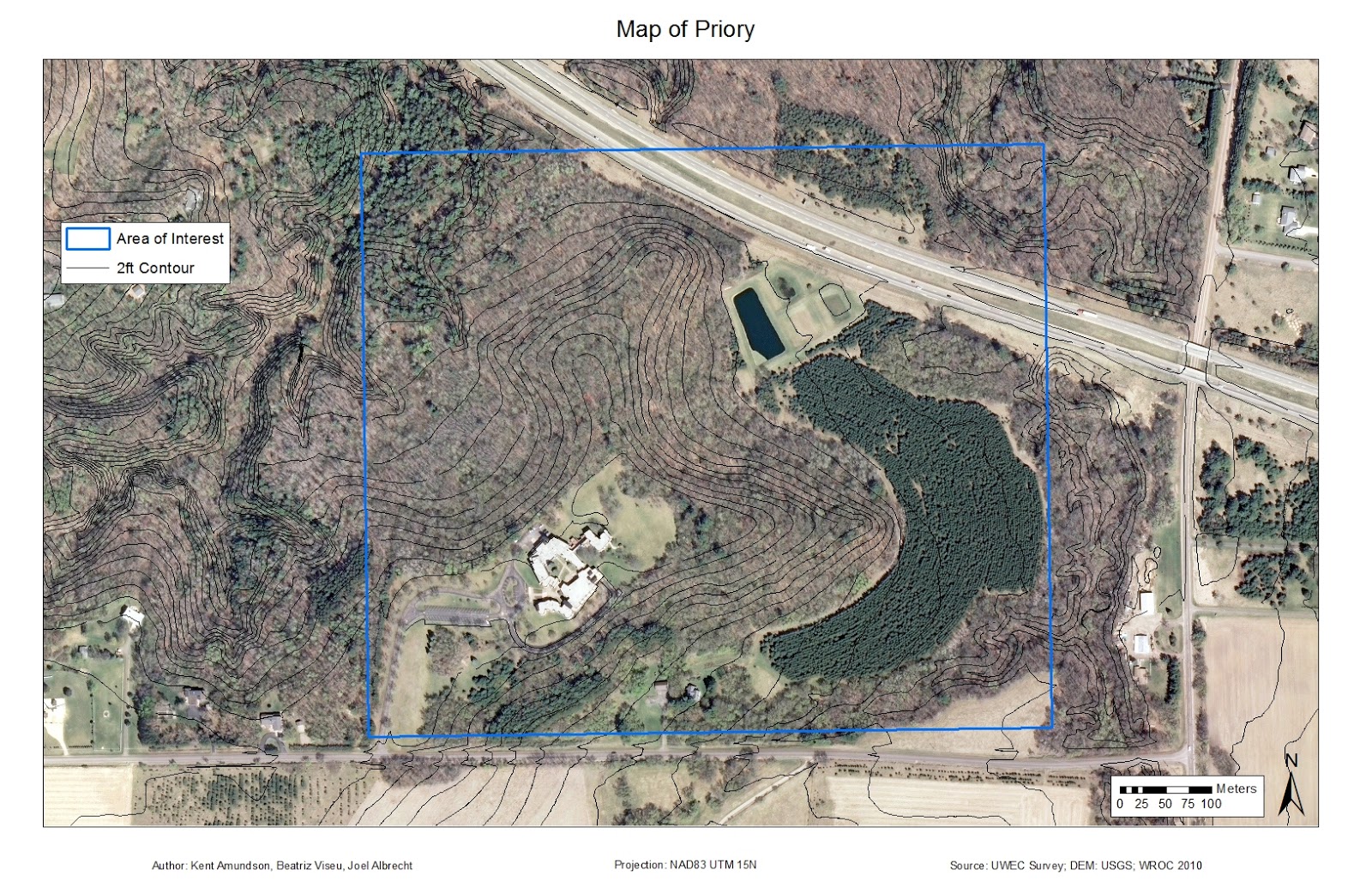 |
| Figure 1: Map showing the area of interest at the Priory. All course points are within this boundary. |
Our professor created three navigation courses on this property, with
some overlap in them to make it more difficult and ensure students
are using the proper methods to find the markers (Figure 2). Each
course consists of five points with an orange and white marker at
each point.
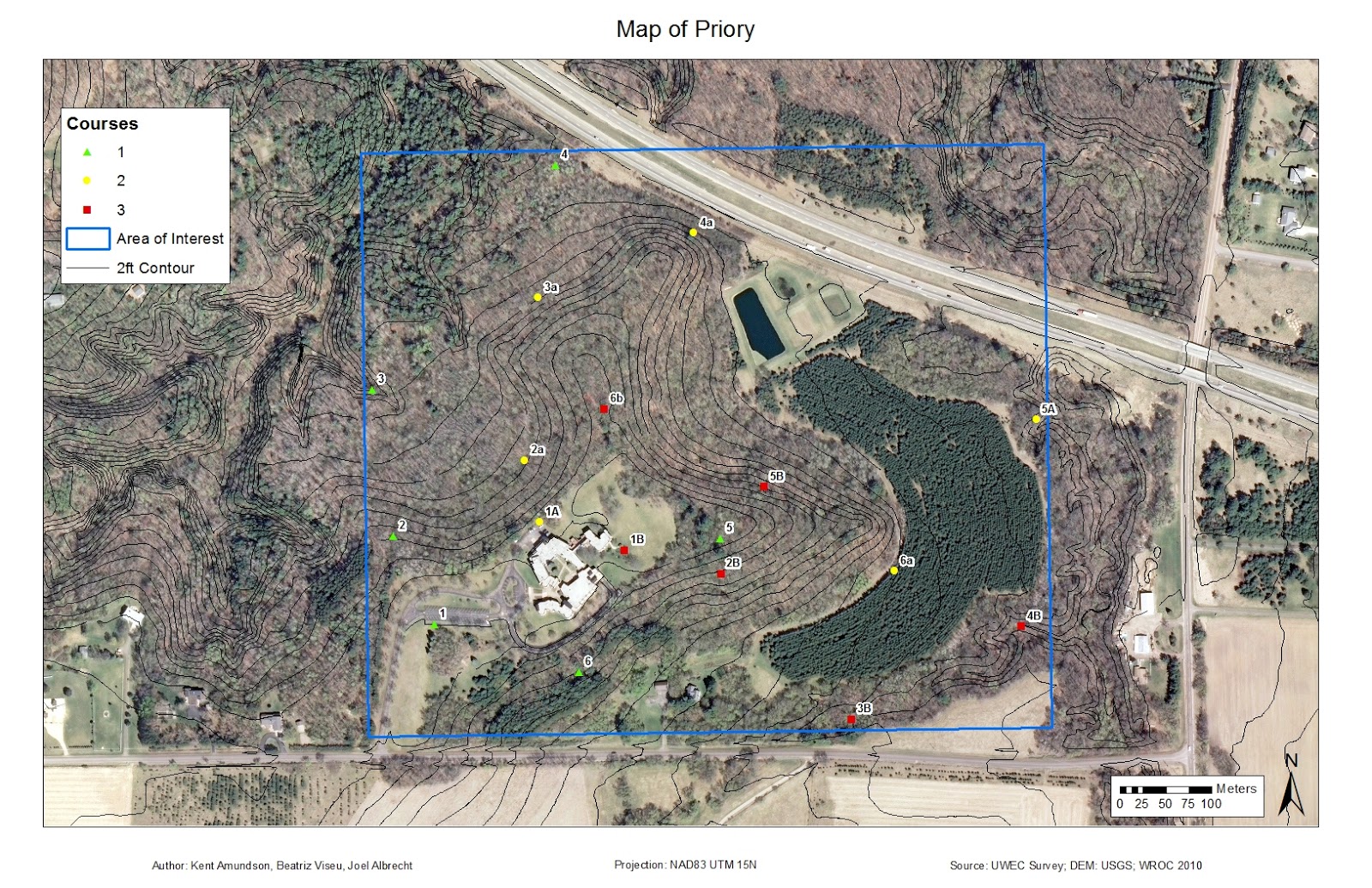 |
Figure 2: Map showing all of the course points and the course they belong to.
The area of interest is included as well, for reference. |
All exercises took place in the month of March, which in Wisconsin
can have quite variable weather. This year the weather was bleak, as
we multiple snow storms and for the most part the temperature
remained below 40 degrees Fahrenheit. The snow storms seemed to
always come on the weekend prior to our Monday expeditions. All
three times that we were at the Priory the snow ranged from ankle to
knee deep, so wearing the proper clothing was necessary to stay warm
(Figure 3).
 |
Figure 3: The snow covered terrain that we had to navigate all three weeks.
It ranged from ankle deep in some spots to knee deep in others. |
Methods
We arrived at the Priory to see 18 Tippman A-5 paintball guns lying
on the pavement with full hoppers and CO2 (Figure 4). We were each
instructed to grab a gun, a mask, and fire off a few shots to get a
feel for the gun for those who haven't paintballed before, which was
only a couple people. Snowshoes were also available to those who
wished to use them. I chose not to since we were paintballing, as I
didn't want to be restricted on movement and I felt they would limit
my agility. Each person was also carrying a Garmin eTrex GPS unit,
again. We were instructed to keep a track log (set to take a point
every 30 seconds) and to mark a waypoint at each marker. The
paintballing rules were that if any member of your team was hit, the
whole team had to sit out for 2 minutes. Also, we were required to
stay away from all buildings and open areas, as is shown on the maps
we created for this week (Figure 5).
 |
| Figure 4: The Tippman A-5 paintball gun. |
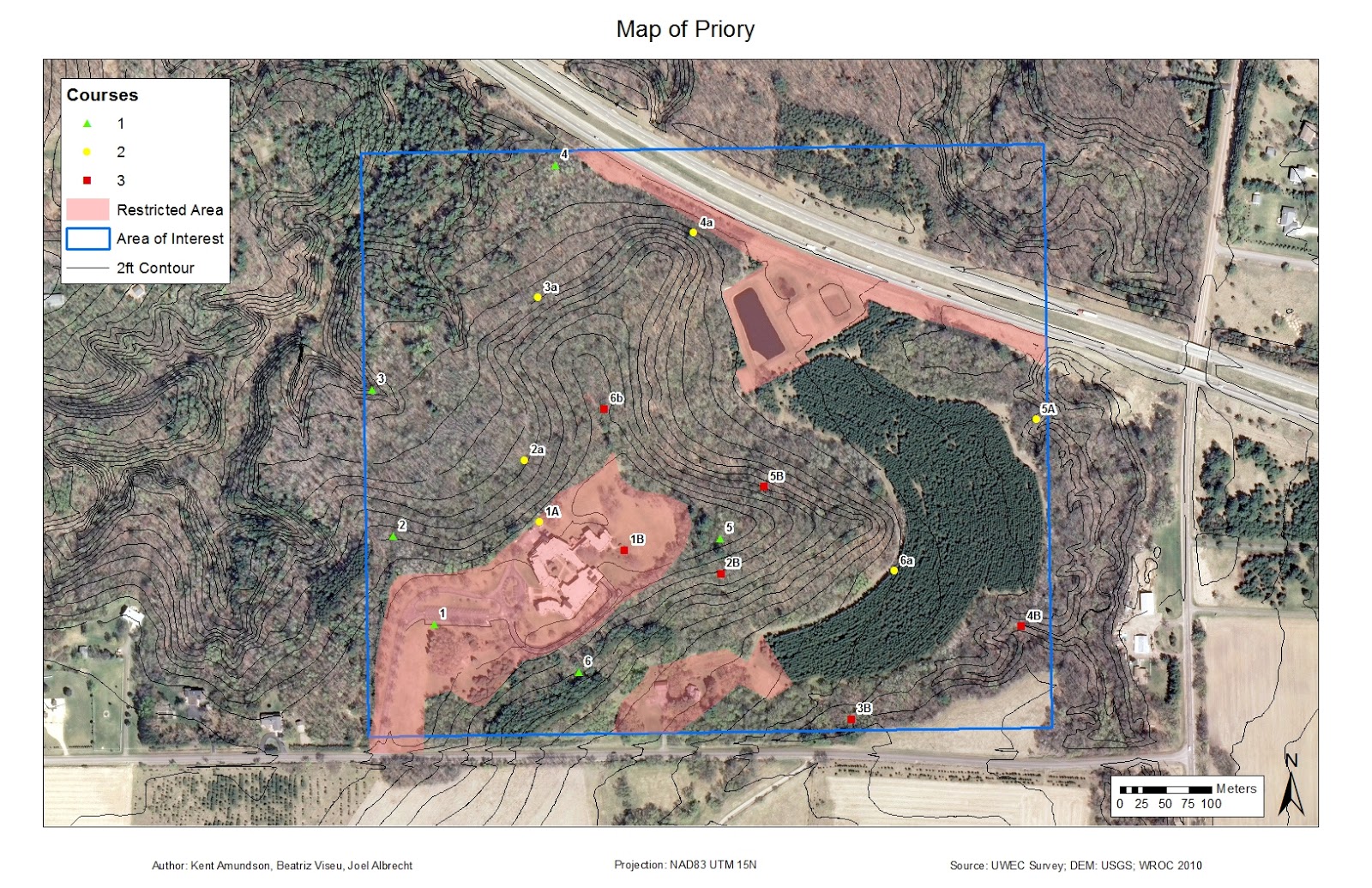 |
Figure 5: Map of the restricted areas, in relation to the course points and area of interest.
The top one was restricted due to visibility from highway. The left area was due the presence
of many small children, and the area on the bottom center was a private residence. |
My group decided to head for the points on course one and two first,
as they were closest to where we were starting. There was a five
minute no shoot at the start so that there wasn't a ton of shooting
right around the starting area, which allowed us to get the first
point with no issues. Shortly after leaving the first point we heard
shooting slightly to the southwest of where we were heading. We
headed straight for the marker in the ravine that we had issues with
during the first navigation exercise. As we approached we saw that
another team was across from us standing on the other ridge. After
about five minutes of shooting back and forth we made a truce. It
was difficult to hit anyone with all of the brush around, the
paintballs kept breaking on the branches. Given the steepness of the
ravine, it was decided that I would take both Joel and Beatriz's GPS
units down with me so I could mark the waypoints, while they stayed
on top to provide cover fire if necessary. I then slid down into the
ravine and proceeded to mark the points. Just as I was finishing,
Joel shouted down to me that another group was coming towards us. I
decided to follow the ravine a ways so that I wasn't sitting in the
open for the other team. While the ravine was fun and easy going
down, it was quite the opposite on the way up, especially when two
members of the other group spotted me on my way up. Luckily our
professor had the PSI turned up on the guns, as this made the guns
even more inaccurate at longer ranges. I took cover behind trees
when necessary, but I was able to make my way back up in bursts.
Once I regrouped with my team we headed on to the next points,
keeping an eye on our backs for the other team.
As we continued on we gathered more points and had a few more
skirmishes. Unfortunately, the masks we were using kept fogging up,
which was rather frustrating at times and heavily limited sight.
Towards the end of our exercise we saw two groups fighting each other
and decided we wanted to flank them and see how much damage we could
do. As we made our way towards them, someone spotted us and two of
them broke off to engage us. After a short firefight, some of us ran
out of ammo while others realized how low they were, so we formed a 9
person group and began heading back towards the starting point since
it was getting towards the end of our time.
After the exercise, we had to upload our track logs and waypoints
into ArcMap and place them in a public folder for everyone to access
and create maps with, again. Figures 6 through 8 show the maps I
created of the exercise. When looking at just my track log in Figure
6, you can see the locations that firefights occurred, as there are
many dots in a small area.
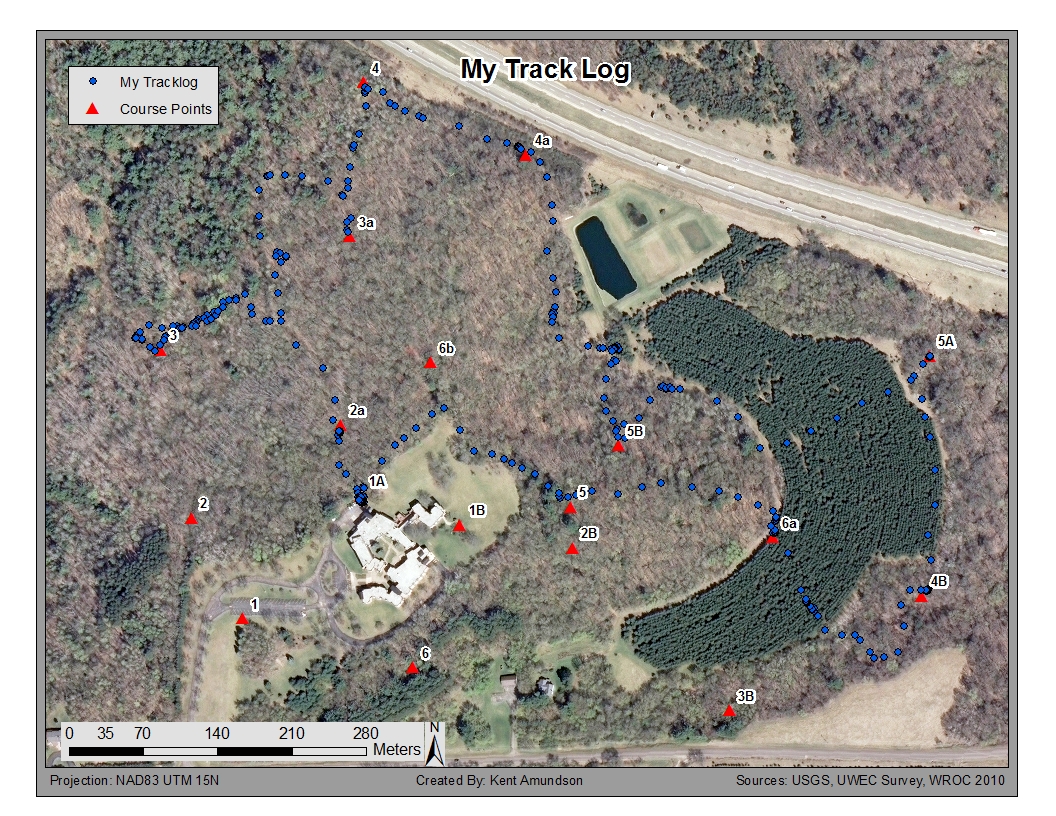 |
Figure 6: This map depicts the path I was took in navigating the course markers.
Areas with a greater point density are where shootouts occurred. |
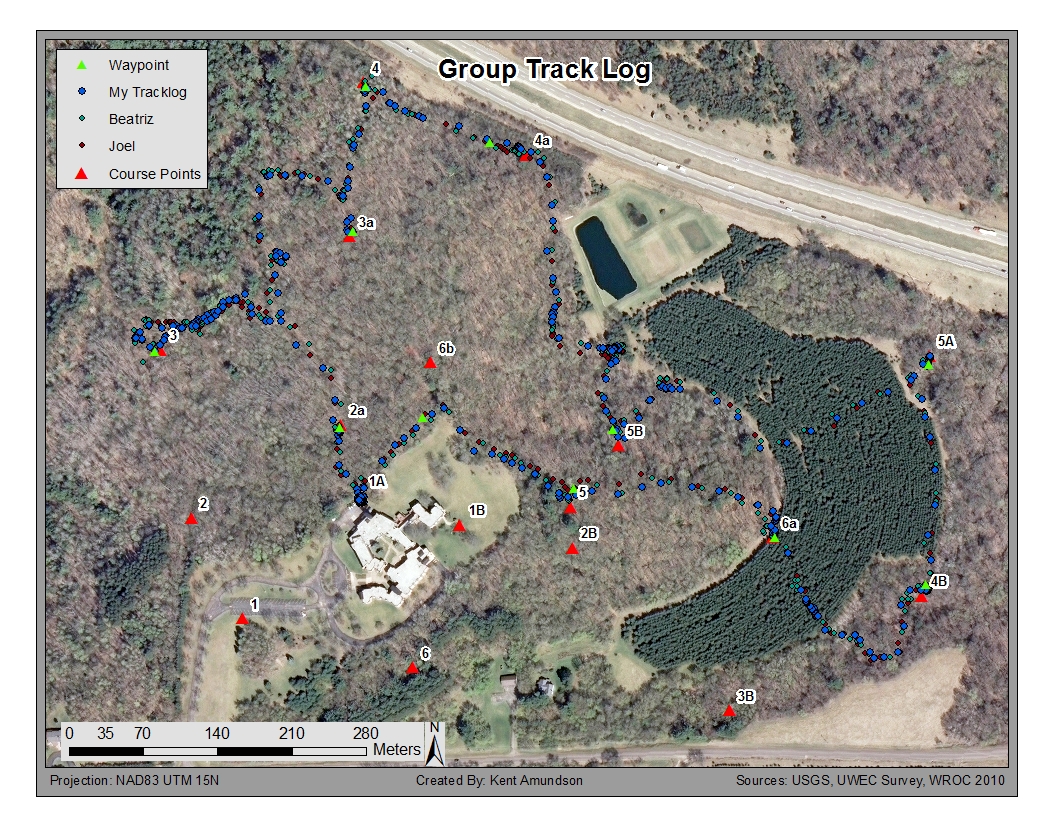 |
Figure 7: This map shows the track logs of all three group members. Since I was carrying all three GPS
units after the first encounter, differences in position are mostly due to the positional accuracy of the
GPS unit, along with the track logs being started at different times. |
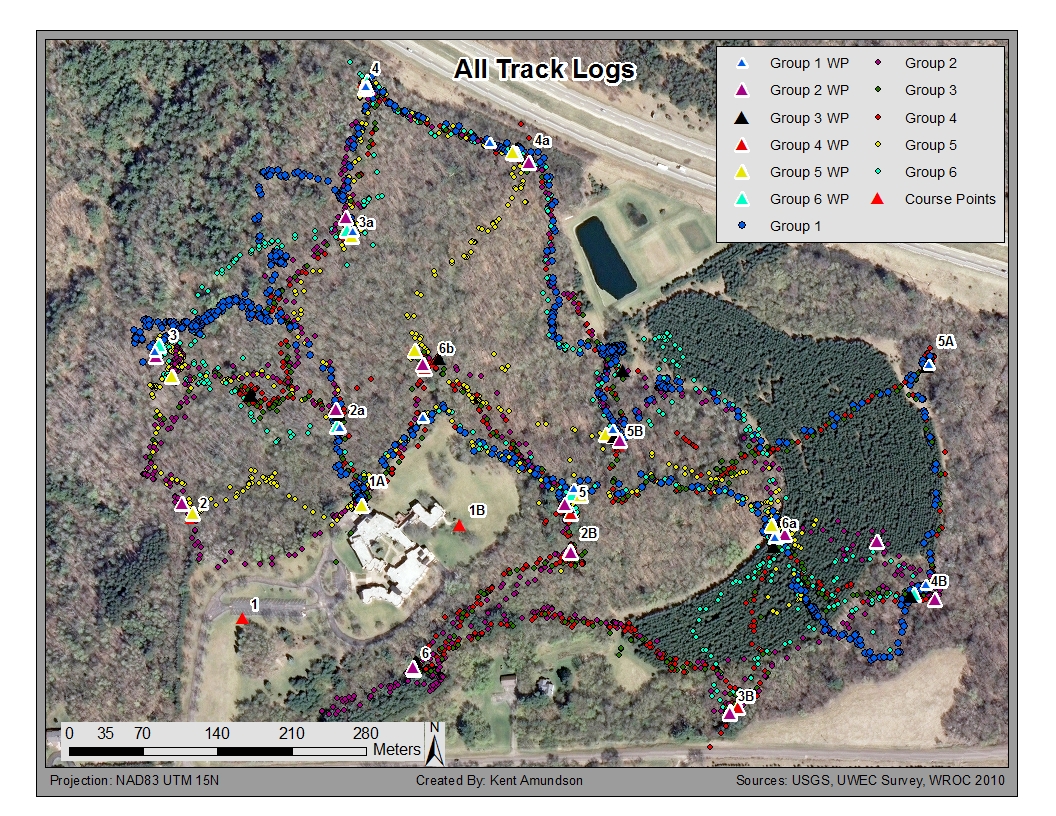 |
| Figure 8: This map shows the track logs and waypoints collected by each group. |
Recapping Prior Weeks
Week
1
During the first week of our land navigation exercise we created a
topographic map (Figure 9) using ArcMap and established a pace count,
both to be used for the second week. All of the following data was
provided for us by the professor: a digital elevation model (DEM)
obtained from USGS, orthographic images obtained from the Wisconsin
Regional Orthophotography Consortium (WROC) in 2010, and two foot
contour lines that were surveyed by UWEC during the purchase of the
Priory.
The pace count was merely walking in a straight line for 100 meters
and counting how many times you step with your right foot (starting
with your left foot). We did this three times to determine
consistency, and the best person was to be the pace counter for the
exercise in week two. The counting would be slightly different at
the Priory, given the change in elevation, but for our purpose this
was relatively minor.
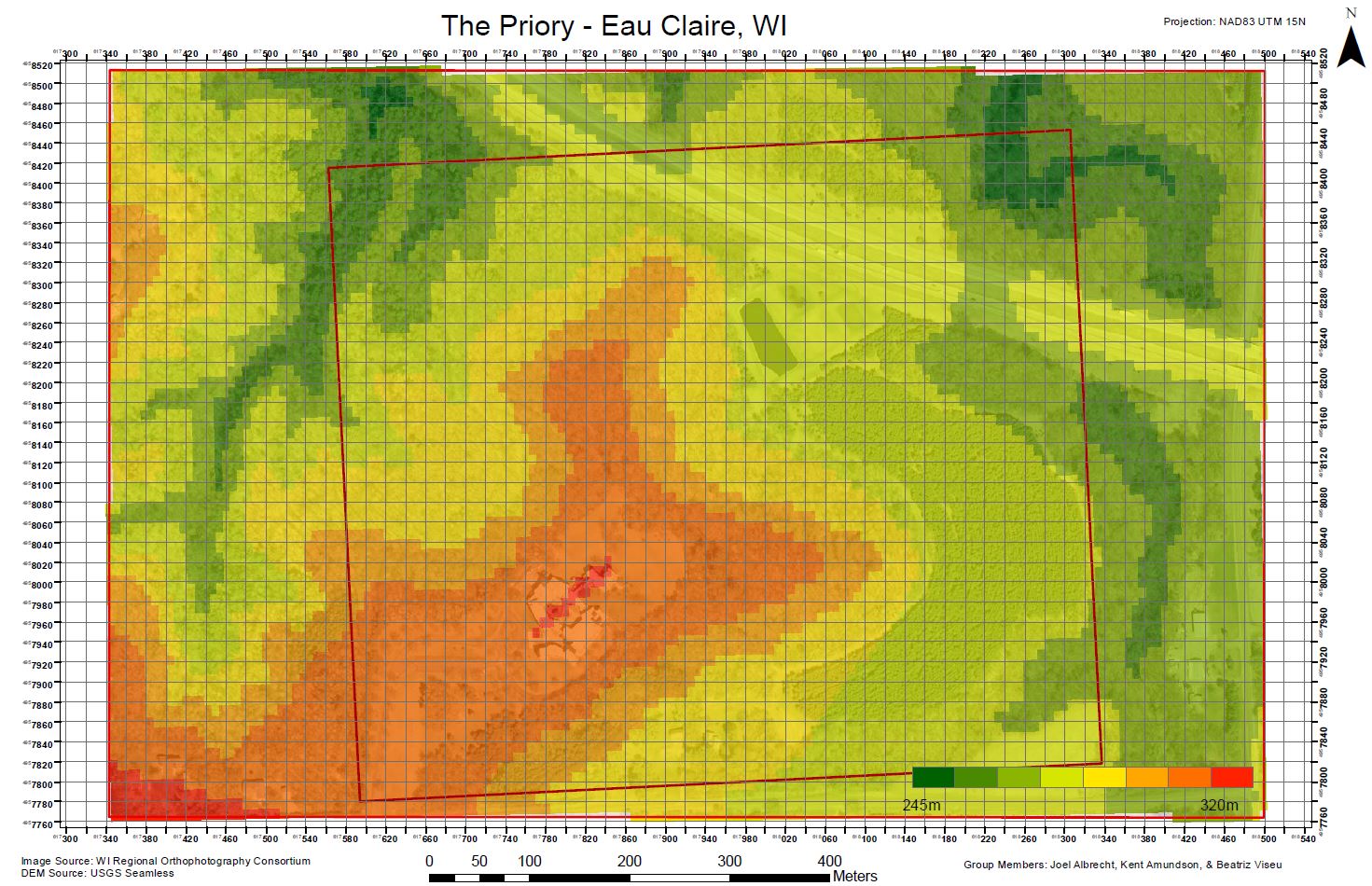 |
Figure 9: This is the map chosen by our group, for use during the first field navigation
exercise conducted at the Priory. |
Week
2
The
second week of our exercises involved navigating the Priory with a
map and compass. The map we created was printed and course marker
locations were given to us in UTM coordinates. We then plotted those
points on the map and received a short briefing on how to use the
compass and how to determine bearing. Once the briefing was
completed, we found the bearings to get to each point and headed
outside to start the course.
This
week was particularly frustrating for my group. While we found the
first point with no issues, the second point tricked us. We did,
however, learn an important lesson: always trust the compass. While
the point didn't look like it was down in the ravine on the map (due
to not using the 2-foot contour lines), it was, and had we just
continued following our compass down we would have seen it. We spent
at least 30 minutes searching for the point before our field
supervisor found us and moved us onward.
Week
3
In
the third week we used a Garmin eTrex GPS unit to navigate another
course at the Priory. Again we were provided UTM coordinates for the
markers, only this time on a different course. This time the
navigation was quick. Initially we paid close attention to our UTM
coordinates on the GPS, and walked in the direction that would make
the numbers get closer to those on our sheet. After the second
point, Joel found out how to create a waypoint with the GPS, which
then displayed an arrow on the screen in the direction we needed to
go and the distance we needed to travel. The course was easy from
then on, with the exception of the terrain and snow up to our knees.
We completed the whole course in just over an hour, which is about
how long we spent on just two points in week two. With track logging
on our GPS unit we were able to create a map showing the path we took
(Figure 10).
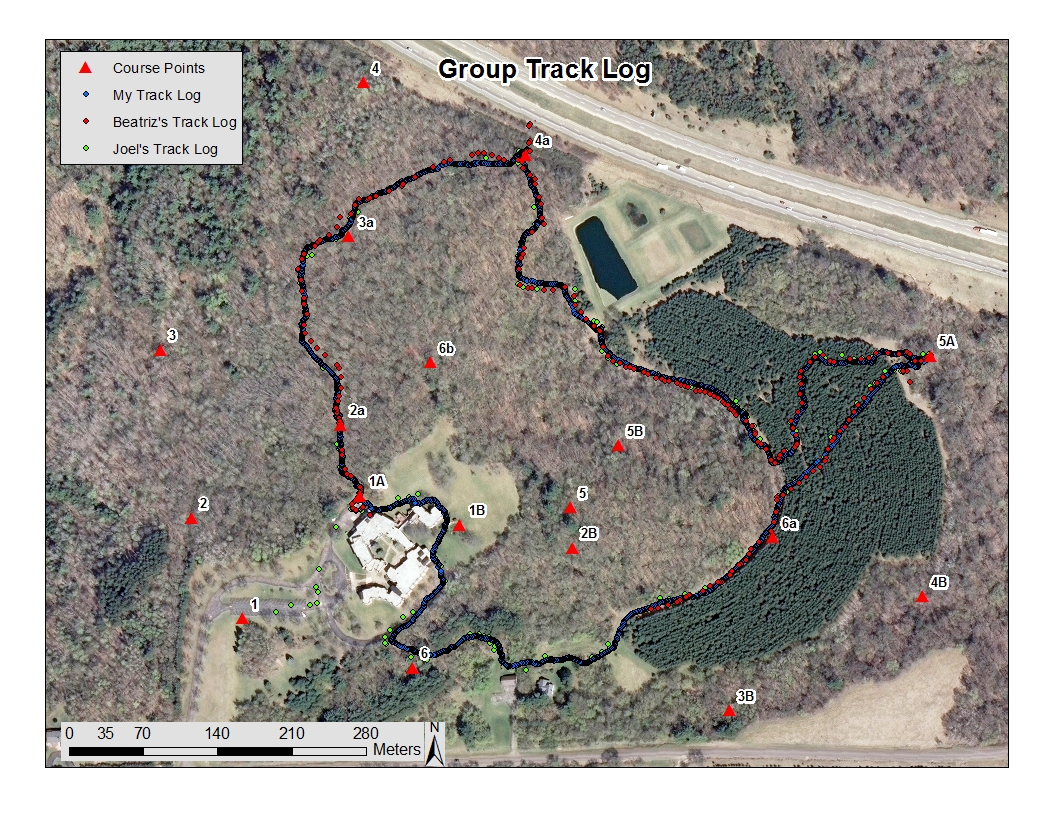 |
| Figure 10: This is my group's track log for week 3's course navigation. |
Discussion
This week's exercise was definitely the easiest, mostly because we
hardly needed to use our GPS or map to find the markers. Since this
was the third time we had been in the field, we knew the first two
courses and the point locations quite well, so the only time we
really needed to use our GPS was for the points on course three.
These land navigation exercises were an excellent learning
experience. Not only did I acquire new skills, but I also learned
from the mistakes that were made throughout these four weeks. In the
first week my group found out the importance of trusting your
compass. Had we trusted it, we would have found the point much
quicker, and would have been able to move on and collect more points.
We chose to trust our map more, but unfortunately the DEM used to
create the map wasn't made with a low enough interval. This resulted
in the marker appearing as though it was on or near the ridge. When
looking at a map that used 2-foot contour lines, it was obvious that
the flag was in the ravine.
Another important lesson learned was how the compass, when used
properly, can be just as accurate (if not more so) than a GPS. The
positional dilution of precision (PDOP) can be affected by canopy
cover, buildings, and the atmosphere. Given that we were in a
forest, the PDOP could vary. We were in this area in winter, when
there is little canopy cover. In summertime, when the trees are in
full bloom, the PDOP would likely be reduced due to the increased
cover. Despite navigation by compass being much slower, it is always
a good idea to carry a compass, just in case your GPS battery dies,
or worse.
Conclusion
While navigation by map and compass is by far the slowest, it can
still be fun and a good secondary option in case of equipment
failure. A map with satellite imagery and contour lines can give a
good idea of the type of terrain that will be covered, allowing for
more suitable paths to be found, and also show landmarks and
vegetation of the area. Even though paintballing was mostly just a
fun addition to the exercise, it also required people to be pay
closer attention to their surroundings. When using the GPS, it was
easy to just put a waypoint on the GPS and walk in the direction of
the next marker. With everyone armed, it encouraged people to
constantly be looking around, taking in the environment.
As can be seen, these exercises have produced multiple skills and
experiences that can be applied to both a professional career and
outdoor hobbies. This post brings an end to the land navigation
exercises conducted over the last four weeks.














.png)
.png)
.png)
.png)
.png)



























